获奖情况:
第二十三届全国大学生机器人大赛ROBOTAC对抗赛一等奖
第二十三届全国大学生机器人大赛ROBOTAC异形足竞速赛一等奖
第二十四届全国大学生机器人大赛ROBOTAC对抗赛一等奖
第二十四届全国大学生机器人大赛ROBOTAC异形足竞速一等奖
作品简介:
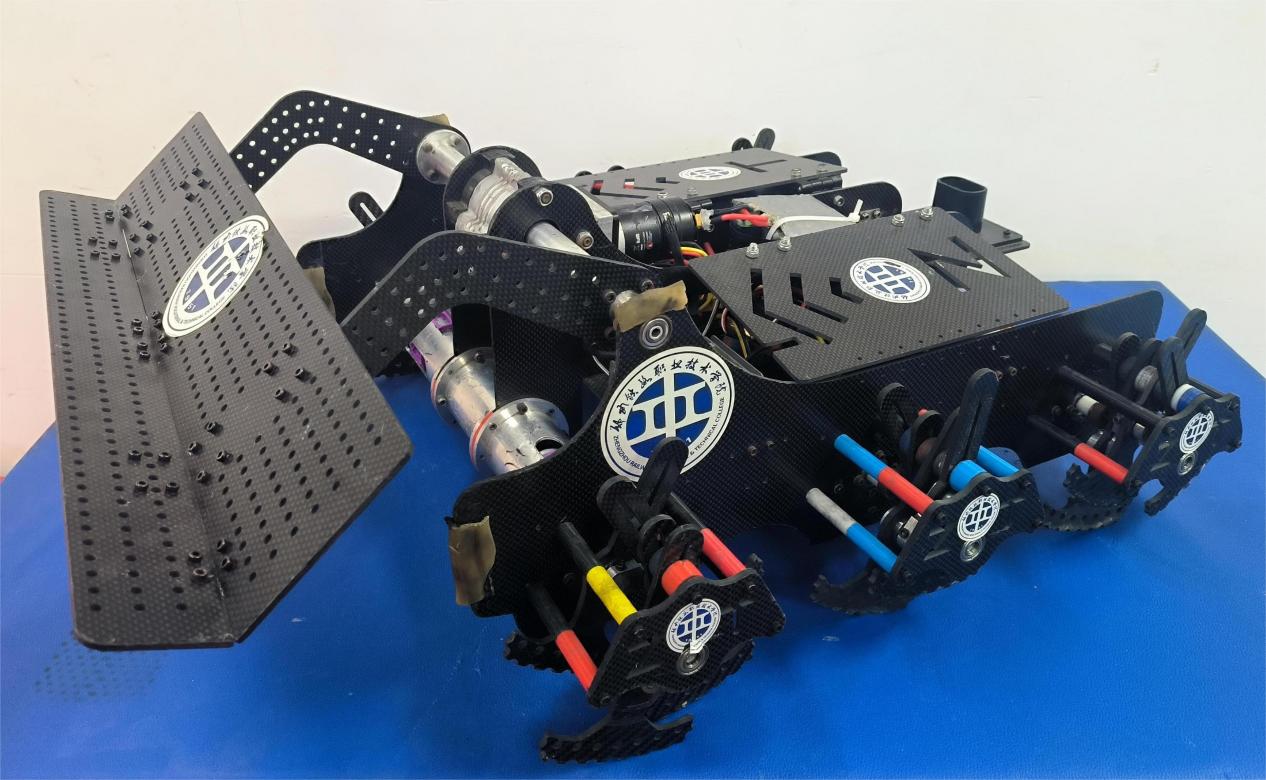
六足异形机器人在原有异形足式机器人的基础上通过改进机械结构,成功实现了独特的分段式自救:在被掀翻后通过铲臂的转动将位置回正。在对抗越发激烈的赛场上,异形足式机器人以自身凸轮带动足片的独特运动结构展现了强劲的运动和对抗能力,总能及时完成拦截和压制对手的任务。此外机器人新增的挡板在起到限位作用的同时也能在激烈的对抗中保护电路。多种机械结构的更新进一步提升了六足异形机器人的对抗能力,成为团队在ROBOTAC比赛的强大助力。
制作人:闫仕豪 动车技术22A1
程 博 铁道机车23A2
汪 瑜 铁道信号23A2